РОБОСТЕП
БЛОКИ (Подпрограммы)
Движение вперед/назад

Данный блок предназначен для проезда вперед/назад на заданное количество сантиметров.
Для проезда назад указываем отрицательное количество сантиметров.
Движение в перед/назад с остановкой по датчику касания
Данный блок предназначен для проезда вперед/назад до/от препятствия.
v — задаем скорость робота.
sm — для проезда вперед указываем положительное число, например 1.
Блок проезда вперед с остановкой на перекрестке по счету.
Движение по линии
v — задаем скорость робота.
number — задаем на каком перекрестке по счету останавливаемся.
Блок поворот налево на одном колесе

v — задаем скорость робота.
grad — угол поворота.
Блок поворот направо на одном колесе

v — задаем скорость робота.
grad — угол поворота.
Блок танкового поворота налево

v — задаем скорость робота.
grad — угол поворота.
Блок танкового поворота направо

v — задаем скорость робота.
grad — угол поворота.
Блок поворот налево на одном колесе (обратный поворот)
v — задаем скорость робота.
grad — угол поворота.
Блок поворот направо на одном колесе (обратный поворот)
v — задаем скорость робота.
grad — угол поворота.
Движение в перед/назад с остановкой по датчику расстояния

v — задаем скорость робота.
sm — для проезда вперед указываем положительное число, например 1.
line — расстояние до препятствия.
Блок проезда вперед с остановкой на не белой линии.

v — скорость робота
sm — для положительного направления указываем положительное число — 1.
color1 — нижняя граница отраженного света (для не белого указываем 0)
color2 — верхняя граница отраженного света (для не белого указываем 3500)
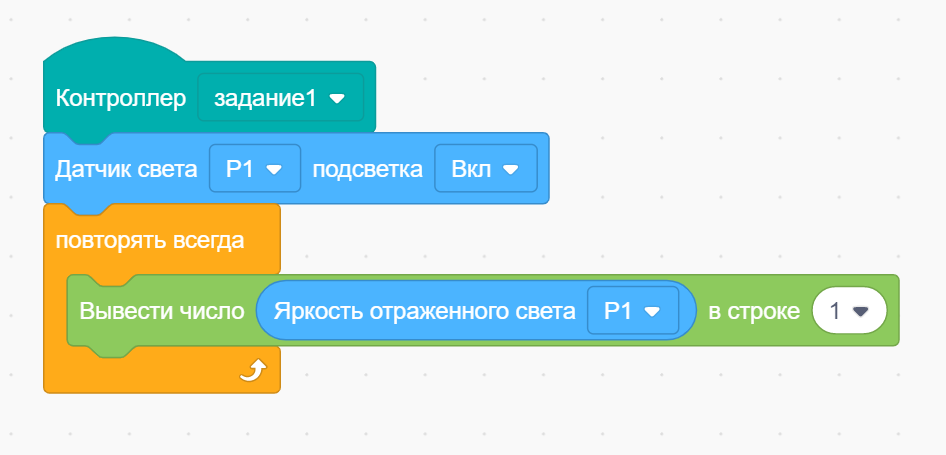
Калибровка датчиков освещенности при движении по линии.
Калибровка датчиков освещенности перед тем как использовать блок движение по линии.
Для тех кто еще не участвовал: Динамика 1
Для тех кто участвовал и занял место: Динамика 2
Для тех кто участвовал и не занял место: Динамика 1 или Динамика 2
Динамика 1
4.1.Проехать прямо вперед в течение t секунд и остановиться. Например t = 1 сек.
4.2.Проехать прямо назад в течение t секунд и остановиться.
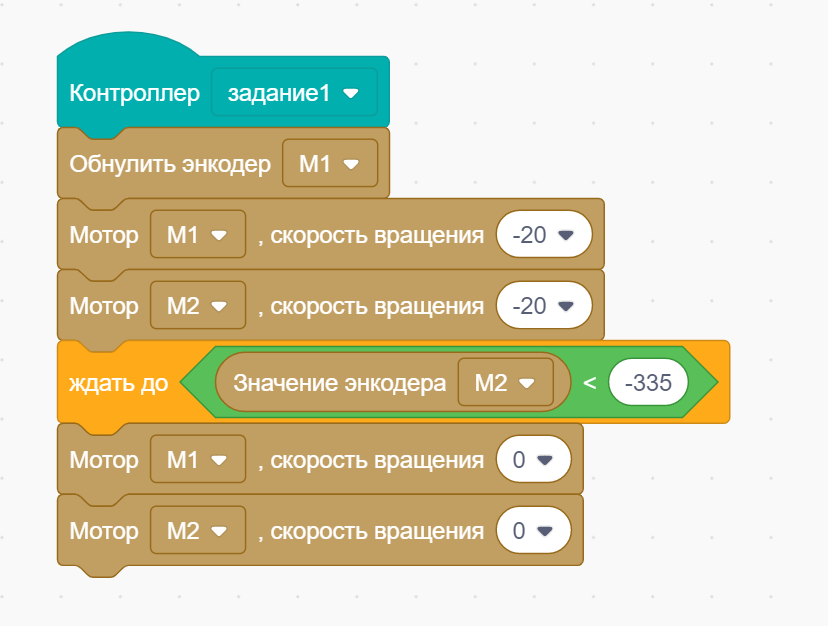
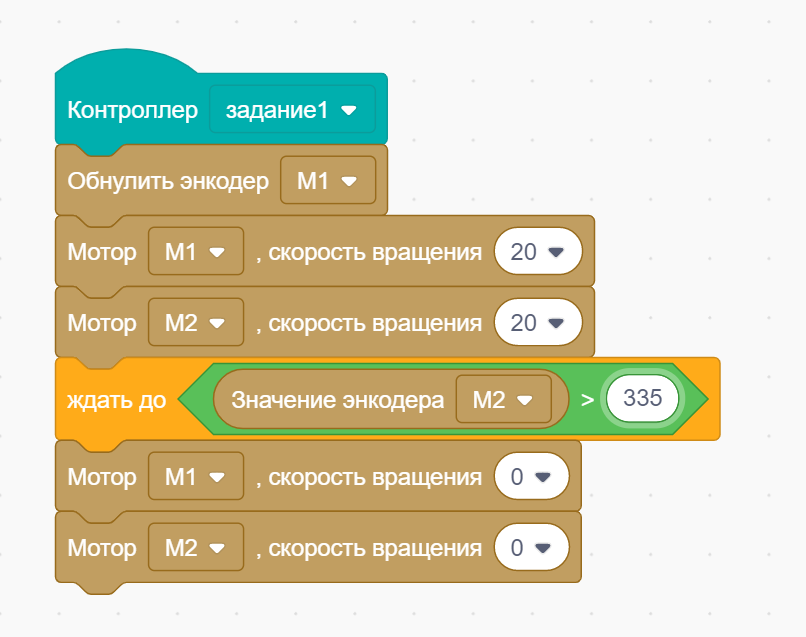
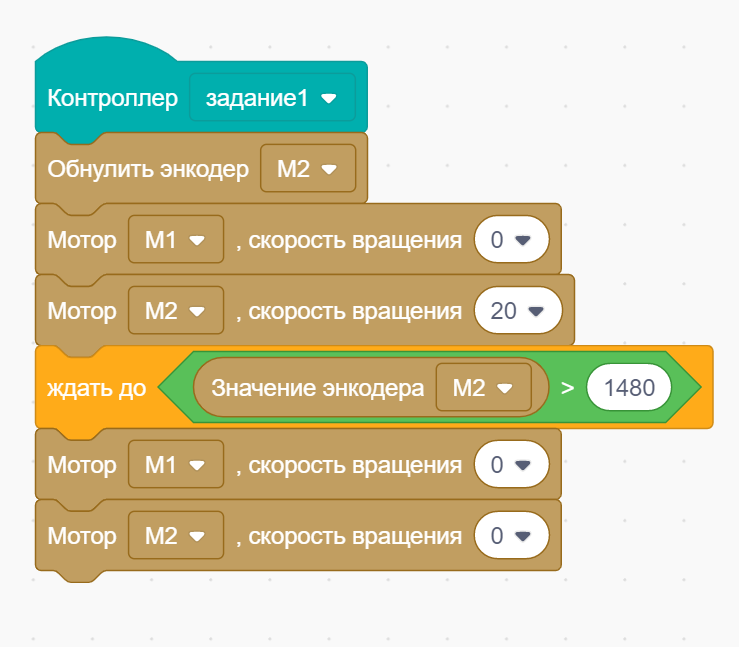
4.3.Проехать прямо вперед S см и остановиться.

335 — проезд 10 см (для каждого робота подбирается индивидуально)
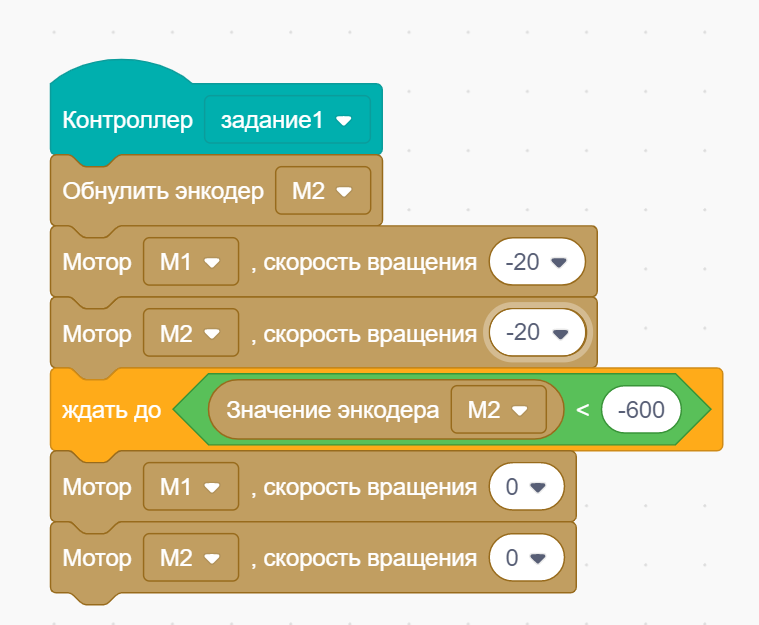
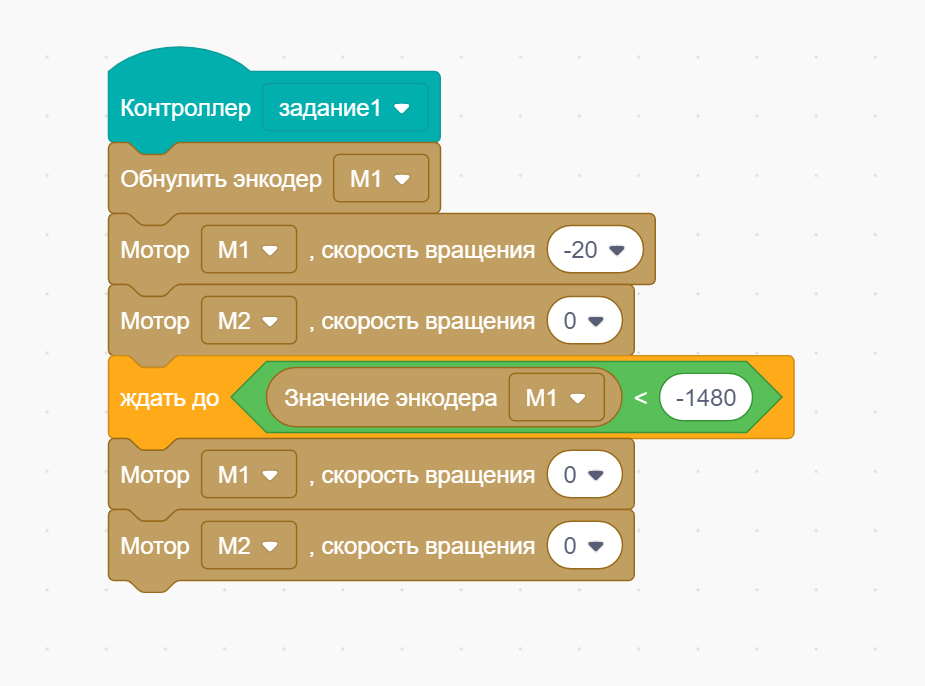
4.4.Проехать прямо назад S см и остановиться.

Считываем энкодер М1
4.5. Определение расстояния до объекта (метки);
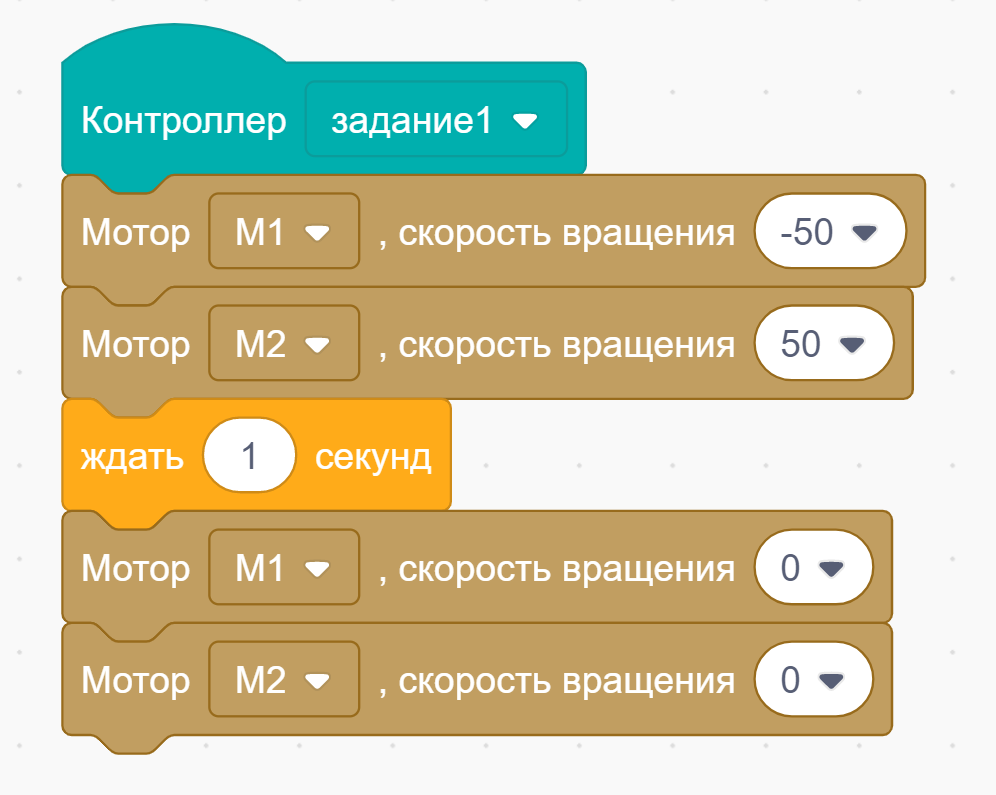
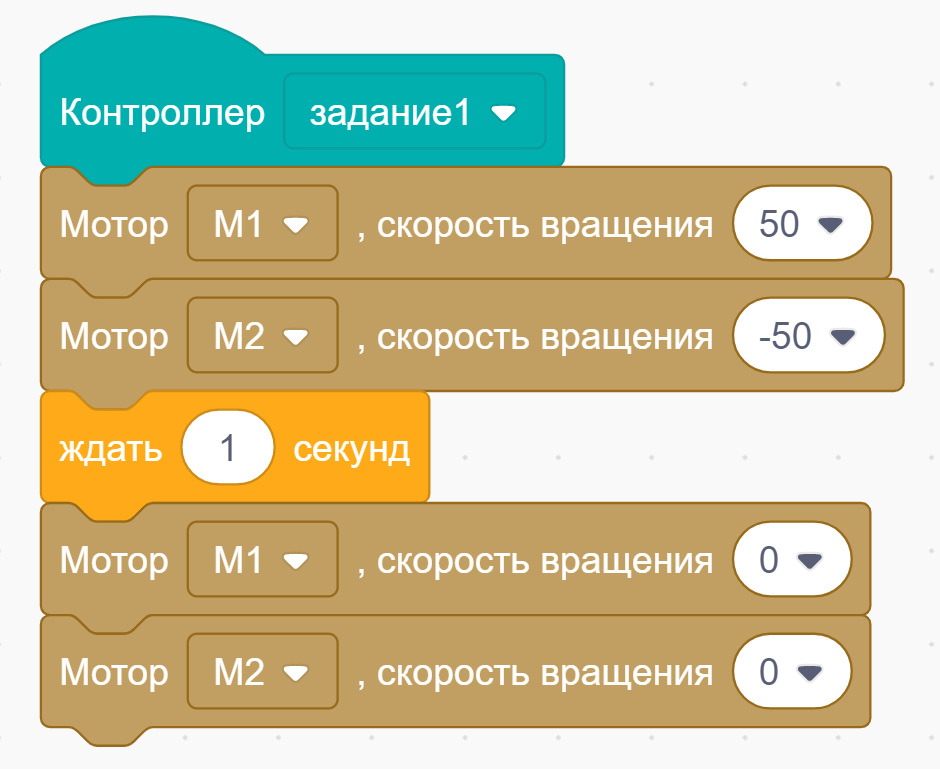
4.6.Выполнить танковый поворот направо на 90
4.7.Выполнить танковый поворот налево на 90
4.8.Выполнить танковый поворот направо на 180
4.9.Выполнить танковый поворот налево на 180

4.10. Выполнить поворот направо на 90 вокруг одного колеса (одно колесо
заблокировано, второе вращается вперед или назад).
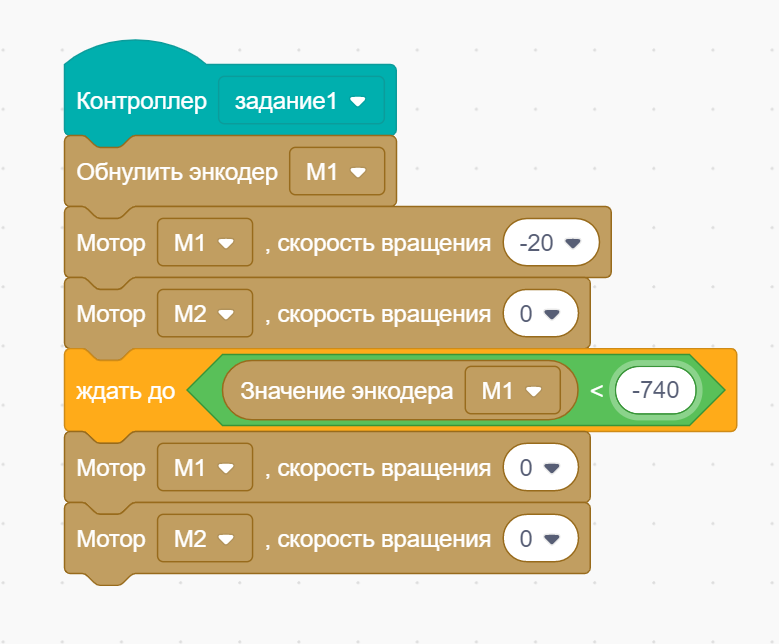
4.11. Выполнить поворот налево на 90 вокруг одного колеса (одно колесо
заблокировано, второе вращается вперед или назад).

4.12. Выполнить поворот направо на 180 вокруг одного колеса (одно
колесо заблокировано, второе вращается вперед или назад).
4.13. Выполнить поворот налево на 1800 вокруг одного колеса (одно колесо
заблокировано, второе вращается вперед или назад).
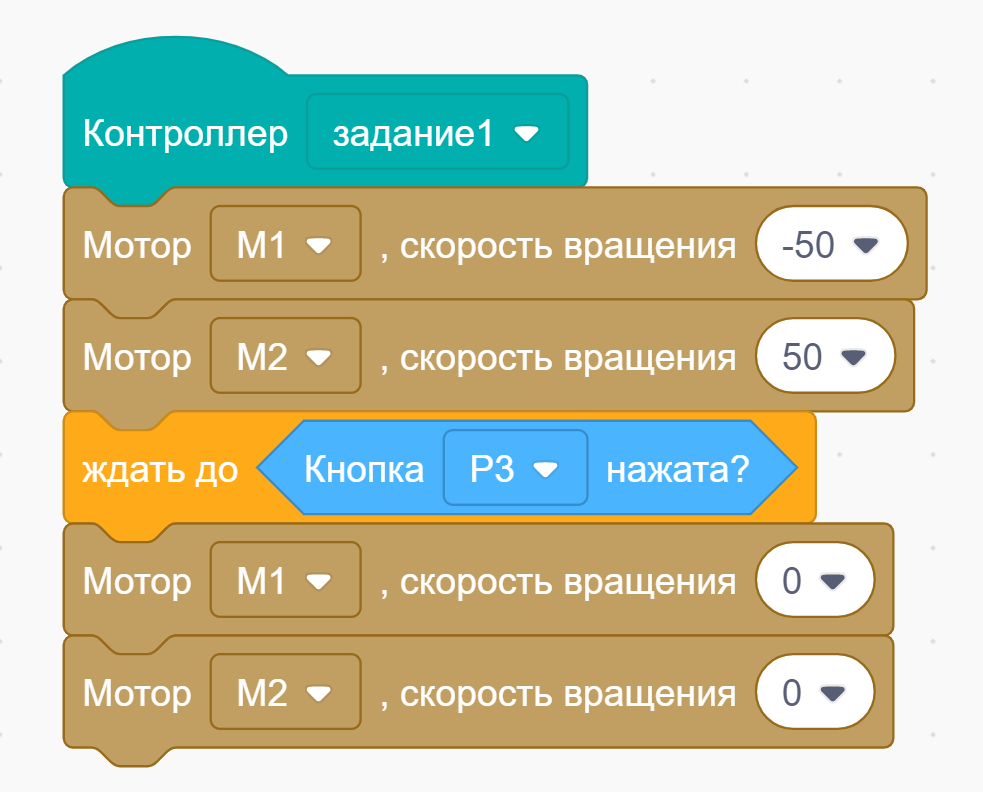
4.14. Проезд вперед с остановкой по датчику касания
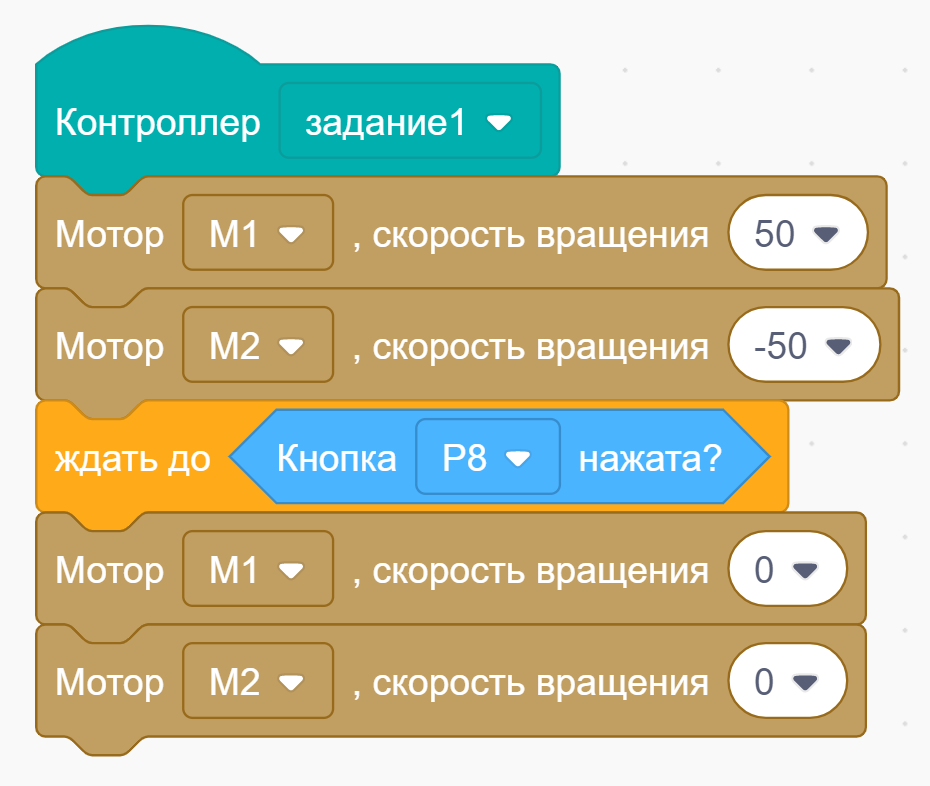
4.15. Проезд назад с остановкой по датчику касания.
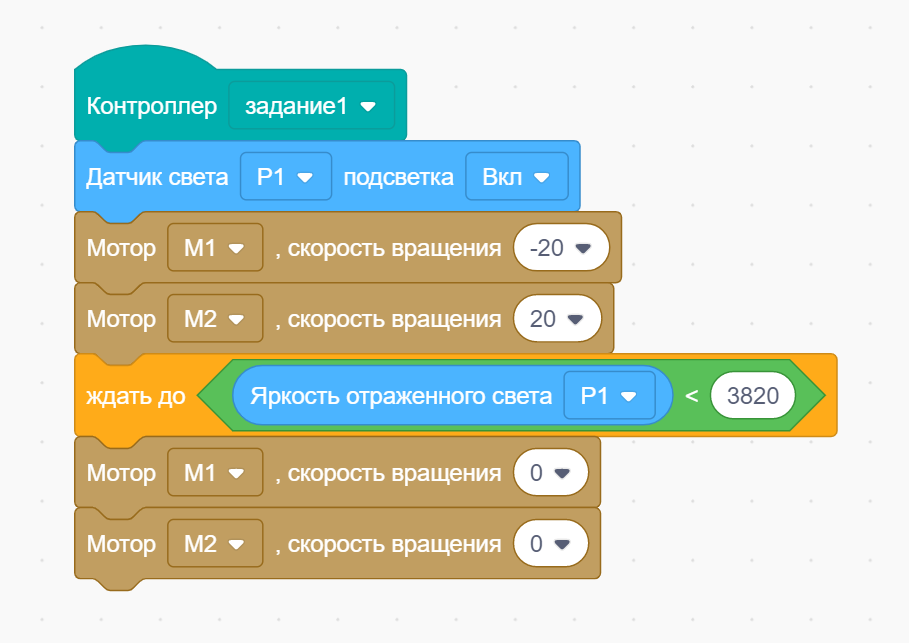
4.16. Проезд вперед с остановкой на черной (белой) линии.
Калибровка
Проезд и остановка
4.17. Проезд назад с остановкой на черной (белой) линии.
4.18. Проезд вперед с остановкой на заданном расстоянии от препятствия.
4.19. Проезд вперед с обнаружением объекта сбоку.
4.20. Проезд назад с обнаружением объекта сбоку.
4.21. Прямолинейное перемещение кегли в зону.
4.22. Непрямолинейное перемещение кегли на поле.
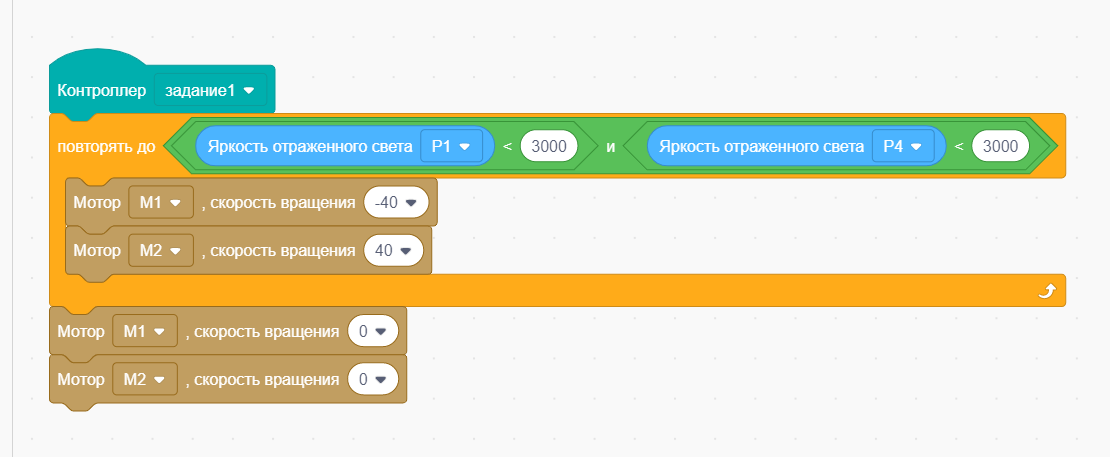
4.23. На поле расположены две параллельные черные линии,
расположенные на расстоянии не менее 10 см друг от друга. Робот
двигается перпендикулярно линиям должен остановиться на второй
линии. Расстояние между линиями меняется от попытки к попытке.
Динамика 2
Движение по черной линии до перекрестка
Проезд через перекресток